
ブレーキ雑学講座
運転者と運転支援システム・装置 その1
2006年の交通事故死亡者は6,352人と51年ぶりの低水準だったそうです。
しかし交通事故件数・負傷者数はそれほど減っていません。
(特に高齢運転者の事故が急増しているのは、TV、新聞報道でご存じの通りです。)
そこでこれらを低減するための一手段として近年、運転負荷軽減支援システム、事故回避支援システムなどが
研究、開発、実用化されています。
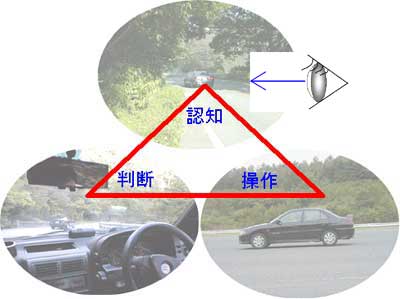
クルマの運転動作は、大きく分けて「認知」、「判断」、「操作」の3段階に分類できますが、これらの各動作について
運転者と支援システム・装置がどのように関係しているかについてお話ししましょう。

先ずは、「認知」です。
運転者は視覚、聴覚などの五感を使って障害物、対向車、歩行者などを認知しています。五感の中でも視覚
からの情報量が大多数を占めているそうですが、この視覚がいつも正しいとは限りません。低速より高速、昼間
より夜間、晴れより雨の方が不正確になってきます。この視覚を直接支援するものとして、夜でも見える
ナイトビジョン、車間距離がわかる車間測定装置などがあります。
また、道路情報を運転者に知らせるナビなども一種の支援装置かも知れません。
これらの支援装置により、運転者は迅速、正確な認知が可能になり、事故を防止することができます。
運転者と支援装置の関係は良好といってもいいでしょう。
なお、間接的な認知支援装置としては減速度センサー、ヨーレートセンサー、ペダルストロークセンサー、
圧力センサーなど各種の支援システムに組み込まれている車両状態監視センサーがあります。
次は、「判断」です。
運転者は認知後、クルマをどうするか判断します。例えば前方に障害物を見つけた場合、ハンドル操作で逃げるか、
ハンドル操作でダメだとしたらブレーキをどのように踏むかなどを迅速、的確に判断します。この判断が遅れたり
間違ったりすると事故につながります。この判断を支援するのが事故回避支援システム、
運転軽減支援システムです。
例えば、前方障害物衝突防止支援システムの場合、システムは車両状態監視センサー
からの情報をもとに、前車との距離、前車速度、自車速度などを計算し危険かどうか判断しています。
危険と判断した時は、運転者に「危険!」と警報を出します。運転者は警報に基づきブレーキなどの操作を行います。
システムは運転者がブレーキをかけた後も引き続きクルマの状況を監視していますので、運転者にこれ
以上任せて置けないと判断した時は、運転者に関係なく自動的にブレーキをかけて衝突を回避します。
つまり、システムは運転者とは関係なく自分自身で危険かどうかを判断しているわけです。運転者は、このシステム
の判断に応じてクルマを操作し事故防止を図っています。両者の関係には好き嫌いがありそうです。
例えば、判断能力が衰えている老人などには評判がよさそうですが、ドライビングを楽しむ人には「あまりにも早く
システムが作動しすぎる。自分の思い通りでない。切ってしまえ。」と不評かもしれません。
このように運転者と支援システムの関係は運転習熟度、システムへの期待値などによってかなり変わりそうです。
また日々の天候、道路状況にも影響を受けそうです。なんとなく夫婦の関係みたいですね(納得!)。
つづく
 品番検索
品番検索 FAQ
FAQ